
2024
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Bonse, M. J., Gebhard, T. D., Dannert, F. A., Absil, O., Cantalloube, F., Christiaens, V., Cugno, G., Garvin, E. O., Hayoz, J., Kasper, M., Matthews, E., Schölkopf, B., Quanz, S. P.
Use the 4S (Signal-Safe Speckle Subtraction): Explainable Machine Learning reveals the Giant Exoplanet AF Lep b in High-Contrast Imaging Data from 2011
2024 (misc) Submitted
Rajendran, G., Buchholz, S., Aragam, B., Schölkopf, B., Ravikumar, P.
Learning Interpretable Concepts: Unifying Causal Representation Learning and Foundation Models
2024 (misc)
2023
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
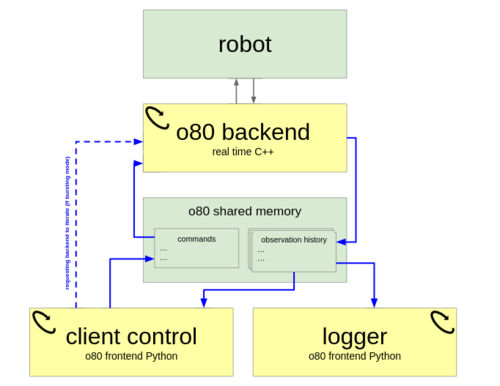
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
Bottou, L., Schölkopf, B.
Borges und die Künstliche Intelligenz
2023, published in Frankfurter Allgemeine Zeitung, 18 December 2023, Nr. 294 (misc)
2022
Wang, H., Jin, Z., Cao, J., Fung, G. P. C., Wong, K.
Inconsistent Few-Shot Relation Classification via Cross-Attentional Prototype Networks with Contrastive Learning
2022 (misc)
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
Prabhoo, S., Bauer, S., Schwab, P.
NCoRE: Neural Counterfactual Representation Learning for Combinations of Treatments
2021 (misc)
Abdulsamad, H., Dorau, T., Belousov, B., Zhu, J., Peters, J.
Distributionally Robust Trajectory Optimization Under Uncertain Dynamics via Relative-Entropy Trust Regions
2021 (misc)
Arvanitidis, G., González Duque, M., Pouplin, A., Kalatzis, D., Hauberg, S.
Pulling back information geometry
2021 (misc)
Wüthrich*, M., Widmaier*, F., Bauer*, S., Funk, N., Urain, J., Peters, J., Watson, J., Chen, C., Srinivasan, K., Zhang, J., Zhang, J., Walter, M. R., Madan, R., Schaff, C., Maeda, T., Yoneda, T., Yarats, D., Allshire, A., Gordon, E. K., Bhattacharjee, T., Srinivasa, S. S., Garg, A., Buchholz, A., Stark, S., Steinbrenner, T., Akpo, J., Joshi, S., Agrawal, V., Schölkopf, B.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
2021, *equal contribution (misc)
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
Panda, S., Shen, C., Perry, R., Zorn, J., Lutz, A., Priebe, C. E., Vogelstein, J. T.
Nonpar MANOVA via Independence Testing
2021 (misc)
Shao, K., Villegas, J. F. R., Logothetis, N. K., Besserve, M.
A model of Ponto-Geniculo-Occipital waves supports bidirectional control of cortical plasticity across sleep-stages
2021 (misc) In preparation
Georgiev, B., Franken, L., Mukherjee, M., Arvanitidis, G.
On the Impact of Stable Ranks in Deep Nets
2021 (misc)

Scientific Report 2016 - 2021
2021 (mpi_year_book)
Perry, R., Tomita, T. M., Mehta, R., Arroyo, J., Patsolic, J., Falk, B., Vogelstein, J. T.
Manifold forests: closing the gap on neural networks
2021 (misc)
Perry, R., Mehta, R., Guo, R., Yezerets, E., Arroyo, J., Powell, M., Helm, H., Shen, C., Vogelstein, J. T.
Random Forests for Adaptive Nearest Neighbor Estimation of Information-Theoretic Quantities
2021 (misc)
Allshire, A., Mittal, M., Lodaya, V., Makoviychuk, V., Makoviichuk, D., Widmaier, F., Wüthrich, M., Bauer, S., Handa, A., Garg, A.
Transferring Dexterous Manipulation from GPU Simulation to a Remote Real-World TriFinger
2021 (misc)
2020
Chicharro, D., Besserve, M., Panzeri, S.
Causal learning with sufficient statistics: an information bottleneck approach
2020 (misc) Submitted
Jin, D., Jin, Z., Mihalcea, R.
Deep Learning for Text Attribute Transfer: A Survey
2020 (misc)
Tosatto, S., Stadtmueller, J., Peters, J.
Dimensionality Reduction of Movement Primitives in Parameter Space
2020 (misc)
Jin, Z., Yang, Y., Qiu, X., Zhang, Z.
Relation of the Relations: A New Paradigm of the Relation Extraction Problem
2020 (misc)
Ke, R., Bilaniuk, O., Goyal, A., Bauer, S., Larochelle, H., Schölkopf, B., Mozer, M. C., Pal, C., Bengio, Y.
Learning Neural Causal Models from Unknown Interventions
2020 (misc)
2019
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
Park, M., Jitkrittum, W.
ABCDP: Approximate Bayesian Computation Meets Differential Privacy
2019 (misc) Submitted

Scientific Report 2016 - 2018
2019 (mpi_year_book)
Pfister, N., Bauer, S., Peters, J.
Identifying Causal Structure in Large-Scale Kinetic Systems
2019 (misc)
Tanneberg, D., Rueckert, E., Peters, J.
Learning Algorithmic Solutions to Symbolic Planning Tasks with a Neural Computer Architecture
2019 (misc)
2018
Schölkopf, B.
Die kybernetische Revolution
S{\"u}ddeutsche Zeitung, 2018, (15-Mar-2018) (misc)
Schölkopf, B.
Maschinelles Lernen: Entwicklung ohne Grenzen?
In Mit Optimismus in die Zukunft schauen. Künstliche Intelligenz - Chancen und Rahmenbedingungen, pages: 26-34, (Editors: Bender, G. and Herbrich, R. and Siebenhaar, K.), B&S Siebenhaar Verlag, 2018 (incollection)
Wichmann, F. A., Jäkel, F.
Methods in Psychophysics
In Stevens’ Handbook of Experimental Psychology and Cognitive Neuroscience, 5 (Methodology), 7, 4th, John Wiley & Sons, Inc., 2018 (inbook)
Veiga, F. F., Edin, B. B., Peters, J.
In-Hand Object Stabilization by Independent Finger Control
2018 (misc)
Jayaram, V., Fiebig, K., Peters, J., Grosse-Wentrup, M.
Transfer Learning for BCIs
In Brain–Computer Interfaces Handbook, pages: 425-442, 22, (Editors: Chang S. Nam, Anton Nijholt and Fabien Lotte), CRC Press, 2018 (incollection)
Garreau, D., Jitkrittum, W., Kanagawa, M.
Large sample analysis of the median heuristic
2018 (misc) In preparation
2017
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J., Schaal, S.
Robot Learning
In Springer Handbook of Robotics, pages: 357-394, 15, 2nd, (Editors: Siciliano, Bruno and Khatib, Oussama), Springer International Publishing, 2017 (inbook)
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
Peters, J., Bagnell, J.
Policy Gradient Methods
In Encyclopedia of Machine Learning and Data Mining, pages: 982-985, 2nd, (Editors: Sammut, Claude and Webb, Geoffrey I.), Springer US, 2017 (inbook)
Flad, N., Fomina, T., Bülthoff, H. H., Chuang, L. L.
Unsupervised clustering of EOG as a viable substitute for optical eye-tracking
In First Workshop on Eye Tracking and Visualization (ETVIS 2015), pages: 151-167, Mathematics and Visualization, (Editors: Burch, M., Chuang, L., Fisher, B., Schmidt, A., and Weiskopf, D.), Springer, 2017 (inbook)