
2024
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Bonse, M. J., Gebhard, T. D., Dannert, F. A., Absil, O., Cantalloube, F., Christiaens, V., Cugno, G., Garvin, E. O., Hayoz, J., Kasper, M., Matthews, E., Schölkopf, B., Quanz, S. P.
Use the 4S (Signal-Safe Speckle Subtraction): Explainable Machine Learning reveals the Giant Exoplanet AF Lep b in High-Contrast Imaging Data from 2011
2024 (misc) Submitted
Rajendran, G., Buchholz, S., Aragam, B., Schölkopf, B., Ravikumar, P.
Learning Interpretable Concepts: Unifying Causal Representation Learning and Foundation Models
2024 (misc)
2023
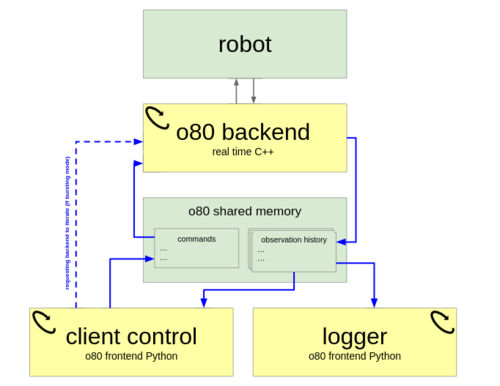
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
Bottou, L., Schölkopf, B.
Borges und die Künstliche Intelligenz
2023, published in Frankfurter Allgemeine Zeitung, 18 December 2023, Nr. 294 (misc)
2022
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
Wang, H., Jin, Z., Cao, J., Fung, G. P. C., Wong, K.
Inconsistent Few-Shot Relation Classification via Cross-Attentional Prototype Networks with Contrastive Learning
2022 (misc)
2021
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
Prabhoo, S., Bauer, S., Schwab, P.
NCoRE: Neural Counterfactual Representation Learning for Combinations of Treatments
2021 (misc)
Abdulsamad, H., Dorau, T., Belousov, B., Zhu, J., Peters, J.
Distributionally Robust Trajectory Optimization Under Uncertain Dynamics via Relative-Entropy Trust Regions
2021 (misc)
Arvanitidis, G., González Duque, M., Pouplin, A., Kalatzis, D., Hauberg, S.
Pulling back information geometry
2021 (misc)
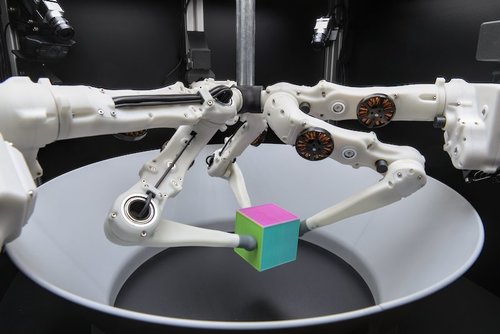
Wüthrich*, M., Widmaier*, F., Bauer*, S., Funk, N., Urain, J., Peters, J., Watson, J., Chen, C., Srinivasan, K., Zhang, J., Zhang, J., Walter, M. R., Madan, R., Schaff, C., Maeda, T., Yoneda, T., Yarats, D., Allshire, A., Gordon, E. K., Bhattacharjee, T., Srinivasa, S. S., Garg, A., Buchholz, A., Stark, S., Steinbrenner, T., Akpo, J., Joshi, S., Agrawal, V., Schölkopf, B.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
2021, *equal contribution (misc)
Shao, K., Villegas, J. F. R., Logothetis, N. K., Besserve, M.
A model of Ponto-Geniculo-Occipital waves supports bidirectional control of cortical plasticity across sleep-stages
2021 (misc) In preparation
Georgiev, B., Franken, L., Mukherjee, M., Arvanitidis, G.
On the Impact of Stable Ranks in Deep Nets
2021 (misc)

Scientific Report 2016 - 2021
2021 (mpi_year_book)
Allshire, A., Mittal, M., Lodaya, V., Makoviychuk, V., Makoviichuk, D., Widmaier, F., Wüthrich, M., Bauer, S., Handa, A., Garg, A.
Transferring Dexterous Manipulation from GPU Simulation to a Remote Real-World TriFinger
2021 (misc)
2020
Chicharro, D., Besserve, M., Panzeri, S.
Causal learning with sufficient statistics: an information bottleneck approach
2020 (misc) Submitted
Tosatto, S., Stadtmueller, J., Peters, J.
Dimensionality Reduction of Movement Primitives in Parameter Space
2020 (misc)
Ke, R., Bilaniuk, O., Goyal, A., Bauer, S., Larochelle, H., Schölkopf, B., Mozer, M. C., Pal, C., Bengio, Y.
Learning Neural Causal Models from Unknown Interventions
2020 (misc)
2019
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
Park, M., Jitkrittum, W.
ABCDP: Approximate Bayesian Computation Meets Differential Privacy
2019 (misc) Submitted

Scientific Report 2016 - 2018
2019 (mpi_year_book)
Pfister, N., Bauer, S., Peters, J.
Identifying Causal Structure in Large-Scale Kinetic Systems
2019 (misc)
Tanneberg, D., Rueckert, E., Peters, J.
Learning Algorithmic Solutions to Symbolic Planning Tasks with a Neural Computer Architecture
2019 (misc)
2018
Schölkopf, B.
Die kybernetische Revolution
S{\"u}ddeutsche Zeitung, 2018, (15-Mar-2018) (misc)
Veiga, F. F., Edin, B. B., Peters, J.
In-Hand Object Stabilization by Independent Finger Control
2018 (misc)
Garreau, D., Jitkrittum, W., Kanagawa, M.
Large sample analysis of the median heuristic
2018 (misc) In preparation
2017
Bousquet, O., Gelly, S., Tolstikhin, I., Simon-Gabriel, C. J., Schölkopf, B.
From Optimal Transport to Generative Modeling: the VEGAN cookbook
2017 (misc)
Belousov, B., Peters, J.
f-Divergence constrained policy improvement
2017 (misc)
2016
Ihler, A. T., Janzing, D.
Proceedings of the 32nd Conference on Uncertainty in Artificial Intelligence (UAI)
pages: 869 pages, AUAI Press, June 2016 (proceedings)
Empirical Inference (2010-2015)
Scientific Advisory Board Report, 2016 (misc)
Mittal, A., Raj, A., Namboodiri, V. P., Tuytelaars, T.
Unsupervised Domain Adaptation in the Wild : Dealing with Asymmetric Label Set
2016 (misc)
2015
Besserve, M.
Causal Inference for Empirical Time Series Based on the Postulate of Independence of Cause and Mechanism
53rd Annual Allerton Conference on Communication, Control, and Computing, September 2015 (talk)
Besserve, M.
Independence of cause and mechanism in brain networks
DALI workshop on Networks: Processes and Causality, April 2015 (talk)
Chaves, R., Majenz, C., Luft, L., Maciel, T., Janzing, D., Schölkopf, B., Gross, D.
Information-Theoretic Implications of Classical and Quantum Causal Structures
18th Conference on Quantum Information Processing (QIP), 2015 (talk)
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
Foreman-Mackey, D., Hogg, D. W., Schölkopf, B.
The search for single exoplanet transits in the Kepler light curves
IAU General Assembly, 22, pages: 2258352, 2015 (talk)
2014
Besserve, M., Schölkopf, B., Logothetis, N. K.
Unsupervised identification of neural events in local field potentials
44th Annual Meeting of the Society for Neuroscience (Neuroscience), 2014 (talk)