
2024
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
Immer, A.
Advances in Probabilistic Methods for Deep Learning
ETH Zurich, Switzerland, September 2024, CLS PhD Program (phdthesis)
Park, J.
A Measure-Theoretic Axiomatisation of Causality and Kernel Regression
University of Tübingen, Germany, July 2024 (phdthesis)
Sajjadi, S. M. M.
Enhancement and Evaluation of Deep Generative Networks with Applications in Super-Resolution and Image Generation
University of Tübingen, Germany, July 2024 (phdthesis)
Stimper, V.
Advancing Normalising Flows to Model Boltzmann Distributions
University of Cambridge, UK, Cambridge, June 2024, (Cambridge-Tübingen-Fellowship-Program) (phdthesis)
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
Bonse, M. J., Gebhard, T. D., Dannert, F. A., Absil, O., Cantalloube, F., Christiaens, V., Cugno, G., Garvin, E. O., Hayoz, J., Kasper, M., Matthews, E., Schölkopf, B., Quanz, S. P.
Use the 4S (Signal-Safe Speckle Subtraction): Explainable Machine Learning reveals the Giant Exoplanet AF Lep b in High-Contrast Imaging Data from 2011
2024 (misc) Submitted
Rajendran, G., Buchholz, S., Aragam, B., Schölkopf, B., Ravikumar, P.
Learning Interpretable Concepts: Unifying Causal Representation Learning and Foundation Models
2024 (misc)
2023
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
Paulus, M.
Learning with and for discrete optimization
ETH Zurich, Switzerland, May 2023, CLS PhD Program (phdthesis)
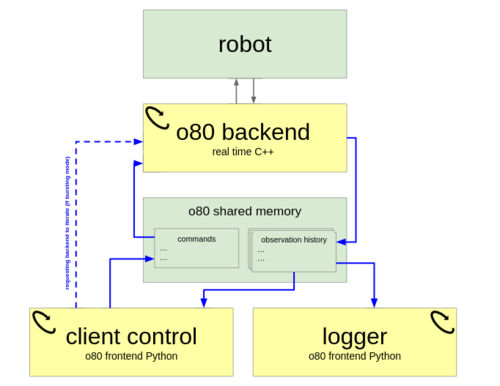
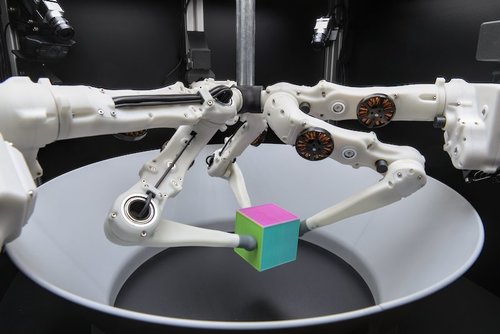
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
Bottou, L., Schölkopf, B.
Borges und die Künstliche Intelligenz
2023, published in Frankfurter Allgemeine Zeitung, 18 December 2023, Nr. 294 (misc)
2022
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Wenk, P.
Learning Time-Continuous Dynamics Models with Gaussian-Process-Based Gradient Matching
ETH Zurich, Switzerland, October 2022, CLS PhD Program (phdthesis)
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, July 2022, external supervision (phdthesis)
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Wang, H., Jin, Z., Cao, J., Fung, G. P. C., Wong, K.
Inconsistent Few-Shot Relation Classification via Cross-Attentional Prototype Networks with Contrastive Learning
2022 (misc)
2021
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)
Meding, K.
Causal Inference in Vision
Eberhard Karls Universität Tübingen, Tübingen, June 2021 (phdthesis)
Bradshaw, J.
Machine Learning Methods for Modeling Synthesizable Molecules
University of Cambridge, UK, Cambridge, April 2021, (Cambridge-Tübingen-Fellowship) (phdthesis)
Prabhoo, S., Bauer, S., Schwab, P.
NCoRE: Neural Counterfactual Representation Learning for Combinations of Treatments
2021 (misc)
Abdulsamad, H., Dorau, T., Belousov, B., Zhu, J., Peters, J.
Distributionally Robust Trajectory Optimization Under Uncertain Dynamics via Relative-Entropy Trust Regions
2021 (misc)
Arvanitidis, G., González Duque, M., Pouplin, A., Kalatzis, D., Hauberg, S.
Pulling back information geometry
2021 (misc)
Wüthrich*, M., Widmaier*, F., Bauer*, S., Funk, N., Urain, J., Peters, J., Watson, J., Chen, C., Srinivasan, K., Zhang, J., Zhang, J., Walter, M. R., Madan, R., Schaff, C., Maeda, T., Yoneda, T., Yarats, D., Allshire, A., Gordon, E. K., Bhattacharjee, T., Srinivasa, S. S., Garg, A., Buchholz, A., Stark, S., Steinbrenner, T., Akpo, J., Joshi, S., Agrawal, V., Schölkopf, B.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
2021, *equal contribution (misc)
Panda, S., Shen, C., Perry, R., Zorn, J., Lutz, A., Priebe, C. E., Vogelstein, J. T.
Nonpar MANOVA via Independence Testing
2021 (misc)
Shao, K., Villegas, J. F. R., Logothetis, N. K., Besserve, M.
A model of Ponto-Geniculo-Occipital waves supports bidirectional control of cortical plasticity across sleep-stages
2021 (misc) In preparation
Georgiev, B., Franken, L., Mukherjee, M., Arvanitidis, G.
On the Impact of Stable Ranks in Deep Nets
2021 (misc)

Scientific Report 2016 - 2021
2021 (mpi_year_book)
Perry, R., Tomita, T. M., Mehta, R., Arroyo, J., Patsolic, J., Falk, B., Vogelstein, J. T.
Manifold forests: closing the gap on neural networks
2021 (misc)
Perry, R., Mehta, R., Guo, R., Yezerets, E., Arroyo, J., Powell, M., Helm, H., Shen, C., Vogelstein, J. T.
Random Forests for Adaptive Nearest Neighbor Estimation of Information-Theoretic Quantities
2021 (misc)
Allshire, A., Mittal, M., Lodaya, V., Makoviychuk, V., Makoviichuk, D., Widmaier, F., Wüthrich, M., Bauer, S., Handa, A., Garg, A.
Transferring Dexterous Manipulation from GPU Simulation to a Remote Real-World TriFinger
2021 (misc)
2020
Mastakouri, A.
Causal Feature Selection in Neuroscience
University of Tübingen, Germany, December 2020 (phdthesis)
Locatello, F.
Enforcing and Discovering Structure in Machine Learning
ETH Zurich, Switzerland, November 2020, (CLS Fellowship Program) (phdthesis)
Bécigneul, G.
On the Geometry of Data Representations
ETH Zurich, Switzerland, September 2020, (CLS Fellowship Program) (phdthesis)
Kilbertus, N.
Beyond traditional assumptions in fair machine learning
University of Cambridge, UK, September 2020, (Cambridge-Tübingen-Fellowship) (phdthesis)
Rubenstein, P.
Advances in Latent Variable and Causal Models
University of Cambridge, UK, July 2020, (Cambridge-Tuebingen-Fellowship) (phdthesis)
Wieschollek, P.
Learning from Multi-Frame Data
University of Tübingen, Germany, July 2020 (phdthesis)