
2024
Immer, A.
Advances in Probabilistic Methods for Deep Learning
ETH Zurich, Switzerland, September 2024, CLS PhD Program (phdthesis)
Park, J.
A Measure-Theoretic Axiomatisation of Causality and Kernel Regression
University of Tübingen, Germany, July 2024 (phdthesis)
Sajjadi, S. M. M.
Enhancement and Evaluation of Deep Generative Networks with Applications in Super-Resolution and Image Generation
University of Tübingen, Germany, July 2024 (phdthesis)
Stimper, V.
Advancing Normalising Flows to Model Boltzmann Distributions
University of Cambridge, UK, Cambridge, June 2024, (Cambridge-Tübingen-Fellowship-Program) (phdthesis)
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
2023
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
Paulus, M.
Learning with and for discrete optimization
ETH Zurich, Switzerland, May 2023, CLS PhD Program (phdthesis)
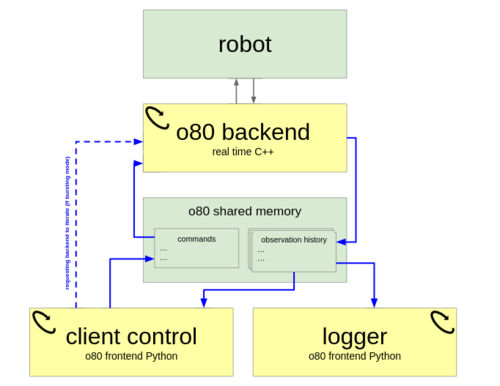
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Wenk, P.
Learning Time-Continuous Dynamics Models with Gaussian-Process-Based Gradient Matching
ETH Zurich, Switzerland, October 2022, CLS PhD Program (phdthesis)
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, July 2022, external supervision (phdthesis)
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
2021
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)
Meding, K.
Causal Inference in Vision
Eberhard Karls Universität Tübingen, Tübingen, June 2021 (phdthesis)
Bradshaw, J.
Machine Learning Methods for Modeling Synthesizable Molecules
University of Cambridge, UK, Cambridge, April 2021, (Cambridge-Tübingen-Fellowship) (phdthesis)

Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
Mastakouri, A.
Causal Feature Selection in Neuroscience
University of Tübingen, Germany, December 2020 (phdthesis)
Locatello, F.
Enforcing and Discovering Structure in Machine Learning
ETH Zurich, Switzerland, November 2020, (CLS Fellowship Program) (phdthesis)
Bécigneul, G.
On the Geometry of Data Representations
ETH Zurich, Switzerland, September 2020, (CLS Fellowship Program) (phdthesis)
Kilbertus, N.
Beyond traditional assumptions in fair machine learning
University of Cambridge, UK, September 2020, (Cambridge-Tübingen-Fellowship) (phdthesis)
Rubenstein, P.
Advances in Latent Variable and Causal Models
University of Cambridge, UK, July 2020, (Cambridge-Tuebingen-Fellowship) (phdthesis)
Wieschollek, P.
Learning from Multi-Frame Data
University of Tübingen, Germany, July 2020 (phdthesis)
Balog, M.
Converting to Optimization in Machine Learning: Perturb-and-MAP, Differential Privacy, and Program Synthesis
University of Cambridge, UK, July 2020, (Cambridge-Tübingen-Fellowship) (phdthesis)
2019
Büchler, D.
Robot Learning for Muscular Systems
Technical University Darmstadt, Germany, December 2019 (phdthesis)
Gomez-Gonzalez, S.
Real Time Probabilistic Models for Robot Trajectories
Technical University Darmstadt, Germany, December 2019 (phdthesis)
Rojas-Carulla, M.
Learning Transferable Representations
University of Cambridge, UK, February 2019 (phdthesis)
Gu, S.
Sample-efficient deep reinforcement learning for continuous control
University of Cambridge, UK, 2019 (phdthesis)
Weichwald, S.
Pragmatism and Variable Transformations in Causal Modelling
ETH Zurich, 2019 (phdthesis)

Scientific Report 2016 - 2018
2019 (mpi_year_book)
Ścibior*, A.
Formally justified and modular Bayesian inference for probabilistic programs
University of Cambridge, UK, 2019 (phdthesis)
Katiyar, P.
Quantification of tumor heterogeneity using PET/MRI and machine learning
Eberhard Karls Universität Tübingen, Germany, 2019 (phdthesis)
Bauer, M.
Advances in Probabilistic Modelling: Sparse Gaussian Processes, Autoencoders, and Few-shot Learning
University of Cambridge, UK, 2019 (phdthesis)
2018
Koc, O.
Optimal Trajectory Generation and Learning Control for Robot Table Tennis
Technical University Darmstadt, Germany, 2018 (phdthesis)
Simon-Gabriel, C. J.
Distribution-Dissimilarities in Machine Learning
Eberhard Karls Universität Tübingen, Germany, 2018 (phdthesis)
Mahsereci, M.
Probabilistic Approaches to Stochastic Optimization
Eberhard Karls Universität Tübingen, Germany, 2018 (phdthesis)
Schober, M.
Probabilistic Ordinary Differential Equation Solvers — Theory and Applications
Eberhard Karls Universität Tübingen, Germany, 2018 (phdthesis)
Jayaram, V.
A machine learning approach to taking EEG-based computer interfaces out of the lab
Graduate Training Centre of Neuroscience, IMPRS, Eberhard Karls Universität Tübingen, Germany, 2018 (phdthesis)
2017
Klenske, E. D.
Nonparametric Disturbance Correction and Nonlinear Dual Control
(24098), ETH Zurich, 2017 (phdthesis)