
2024
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Ortu, F.
Interpreting How Large Language Models Handle Facts and Counterfactuals through Mechanistic Interpretability
University of Trieste, Italy, March 2024 (mastersthesis)
2023
Sakenyte, U.
Denoising Representation Learning for Causal Discovery
Université de Genèva, Switzerland, December 2023, external supervision (mastersthesis)
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
Kladny, K.
CausalEffect Estimation by Combining Observational and Interventional Data
ETH Zurich, Switzerland, February 2023 (mastersthesis)
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
Schneider, F.
ArchiSound: Audio Generation with Diffusion
ETH Zurich, Switzerland, January 2023, external supervision (mastersthesis)
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
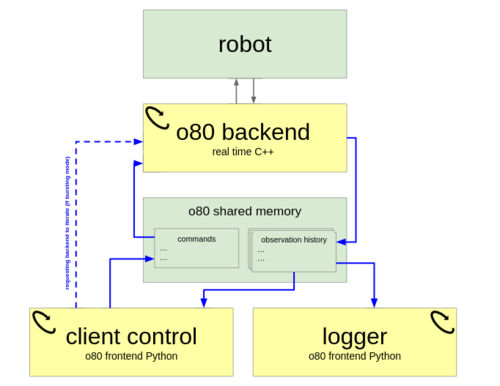
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
Ahmed, O.
A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
ETH Zurich, Switzerland, October 2020 (mastersthesis)
DuMont Schütte, A.
A Comprehensive Benchmark Evaluation of Synthetic Data Generation for Biomedical Imaging
ETH Zurich, Switzerland, October 2020 (mastersthesis)
Cacioppo, A.
Deep learning for the parameter estimation of tight-binding Hamiltonians
University of Roma, La Sapienza, Italy, May 2020 (mastersthesis)
Zecevic, M.
Learning Algorithms, Invariances, and the Real World
Technical University of Darmstadt, Germany, April 2020 (mastersthesis)
2019
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
Stimper, V.
Inferring the Band Structure from Band Mapping Data through Machine Learning
Technical University of Munich, September 2019 (mastersthesis)
Dietz, B.
Learning to Diagnose Diabetes from Magnetic Resonance Tomography
ETH Zurich, Switzerland, August 2019 (mastersthesis)
Li, G.
Reinforcement Learning for a Two-Robot Table Tennis Simulation
RWTH Aachen University, Germany, July 2019 (mastersthesis)
Konieczny, L.
Characteristics of longitudinal physiological measurements of late-stage ALS patients
Ludwig-Maximilians-Universität München, Germany, May 2019 (mastersthesis)
Xu, J.
Spatial Filtering based on Riemannian Manifold for Brain-Computer Interfacing
Technical University of Munich, Germany, 2019 (mastersthesis)
2018
Bustamante, S.
A virtual reality environment for experiments in assistive robotics and neural interfaces
Graduate School of Neural Information Processing, Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Gebhard, T.
On the Applicability of Machine Learning to Aid the Search for Gravitational Waves at the LIGO Experiment
Karlsruhe Institute of Technology, Germany, 2018 (mastersthesis)
Suter, R.
A Causal Perspective on Deep Representation Learning
ETH Zurich, 2018 (mastersthesis)
Lechner, T.
Domain Adaptation Under Causal Assumptions
Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Schölkopf, B.
Maschinelles Lernen: Entwicklung ohne Grenzen?
In Mit Optimismus in die Zukunft schauen. Künstliche Intelligenz - Chancen und Rahmenbedingungen, pages: 26-34, (Editors: Bender, G. and Herbrich, R. and Siebenhaar, K.), B&S Siebenhaar Verlag, 2018 (incollection)
Zabel, S.
Improving Tissue Differentiation based on Optical Emission Spectroscopy for Guided Electrosurgical Tumor Resection with Machine Learning
Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Wichmann, F. A., Jäkel, F.
Methods in Psychophysics
In Stevens’ Handbook of Experimental Psychology and Cognitive Neuroscience, 5 (Methodology), 7, 4th, John Wiley & Sons, Inc., 2018 (inbook)
Guist, S.
Reinforcement Learning for High-Speed Robotics with Muscular Actuation
Ruprecht-Karls-Universität Heidelberg , 2018 (mastersthesis)
Jayaram, V., Fiebig, K., Peters, J., Grosse-Wentrup, M.
Transfer Learning for BCIs
In Brain–Computer Interfaces Handbook, pages: 425-442, 22, (Editors: Chang S. Nam, Anton Nijholt and Fabien Lotte), CRC Press, 2018 (incollection)
2017
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J., Schaal, S.
Robot Learning
In Springer Handbook of Robotics, pages: 357-394, 15, 2nd, (Editors: Siciliano, Bruno and Khatib, Oussama), Springer International Publishing, 2017 (inbook)