
2024
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
Immer, A.
Advances in Probabilistic Methods for Deep Learning
ETH Zurich, Switzerland, September 2024, CLS PhD Program (phdthesis)
Park, J.
A Measure-Theoretic Axiomatisation of Causality and Kernel Regression
University of Tübingen, Germany, July 2024 (phdthesis)
Sajjadi, S. M. M.
Enhancement and Evaluation of Deep Generative Networks with Applications in Super-Resolution and Image Generation
University of Tübingen, Germany, July 2024 (phdthesis)
Stimper, V.
Advancing Normalising Flows to Model Boltzmann Distributions
University of Cambridge, UK, Cambridge, June 2024, (Cambridge-Tübingen-Fellowship-Program) (phdthesis)
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Ortu, F.
Interpreting How Large Language Models Handle Facts and Counterfactuals through Mechanistic Interpretability
University of Trieste, Italy, March 2024 (mastersthesis)
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
Bonse, M. J., Gebhard, T. D., Dannert, F. A., Absil, O., Cantalloube, F., Christiaens, V., Cugno, G., Garvin, E. O., Hayoz, J., Kasper, M., Matthews, E., Schölkopf, B., Quanz, S. P.
Use the 4S (Signal-Safe Speckle Subtraction): Explainable Machine Learning reveals the Giant Exoplanet AF Lep b in High-Contrast Imaging Data from 2011
2024 (misc) Submitted
Rajendran, G., Buchholz, S., Aragam, B., Schölkopf, B., Ravikumar, P.
Learning Interpretable Concepts: Unifying Causal Representation Learning and Foundation Models
2024 (misc)
2023
Sakenyte, U.
Denoising Representation Learning for Causal Discovery
Université de Genèva, Switzerland, December 2023, external supervision (mastersthesis)
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
Paulus, M.
Learning with and for discrete optimization
ETH Zurich, Switzerland, May 2023, CLS PhD Program (phdthesis)
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
Kladny, K.
CausalEffect Estimation by Combining Observational and Interventional Data
ETH Zurich, Switzerland, February 2023 (mastersthesis)
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
Schneider, F.
ArchiSound: Audio Generation with Diffusion
ETH Zurich, Switzerland, January 2023, external supervision (mastersthesis)
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
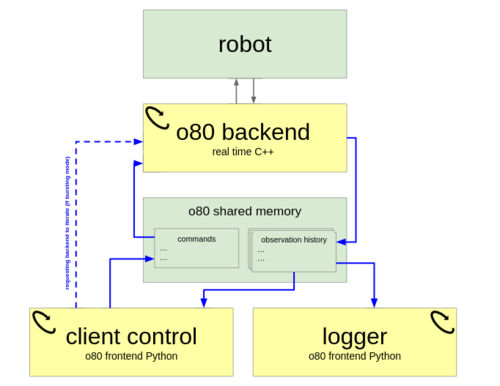
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
Bottou, L., Schölkopf, B.
Borges und die Künstliche Intelligenz
2023, published in Frankfurter Allgemeine Zeitung, 18 December 2023, Nr. 294 (misc)
2022
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
Wenk, P.
Learning Time-Continuous Dynamics Models with Gaussian-Process-Based Gradient Matching
ETH Zurich, Switzerland, October 2022, CLS PhD Program (phdthesis)
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, July 2022, external supervision (phdthesis)
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Wang, H., Jin, Z., Cao, J., Fung, G. P. C., Wong, K.
Inconsistent Few-Shot Relation Classification via Cross-Attentional Prototype Networks with Contrastive Learning
2022 (misc)
2021
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)