
2024
Immer, A.
Advances in Probabilistic Methods for Deep Learning
ETH Zurich, Switzerland, September 2024, CLS PhD Program (phdthesis)
Park, J.
A Measure-Theoretic Axiomatisation of Causality and Kernel Regression
University of Tübingen, Germany, July 2024 (phdthesis)
Sajjadi, S. M. M.
Enhancement and Evaluation of Deep Generative Networks with Applications in Super-Resolution and Image Generation
University of Tübingen, Germany, July 2024 (phdthesis)
Stimper, V.
Advancing Normalising Flows to Model Boltzmann Distributions
University of Cambridge, UK, Cambridge, June 2024, (Cambridge-Tübingen-Fellowship-Program) (phdthesis)
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
2023
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
Paulus, M.
Learning with and for discrete optimization
ETH Zurich, Switzerland, May 2023, CLS PhD Program (phdthesis)
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
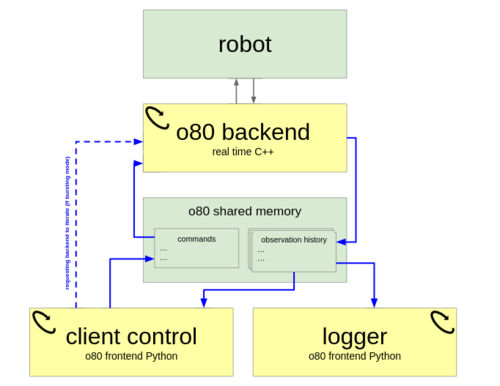
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Wenk, P.
Learning Time-Continuous Dynamics Models with Gaussian-Process-Based Gradient Matching
ETH Zurich, Switzerland, October 2022, CLS PhD Program (phdthesis)
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, July 2022, external supervision (phdthesis)
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)
Meding, K.
Causal Inference in Vision
Eberhard Karls Universität Tübingen, Tübingen, June 2021 (phdthesis)
Bradshaw, J.
Machine Learning Methods for Modeling Synthesizable Molecules
University of Cambridge, UK, Cambridge, April 2021, (Cambridge-Tübingen-Fellowship) (phdthesis)
2020
Mastakouri, A.
Causal Feature Selection in Neuroscience
University of Tübingen, Germany, December 2020 (phdthesis)
Locatello, F.
Enforcing and Discovering Structure in Machine Learning
ETH Zurich, Switzerland, November 2020, (CLS Fellowship Program) (phdthesis)
Bécigneul, G.
On the Geometry of Data Representations
ETH Zurich, Switzerland, September 2020, (CLS Fellowship Program) (phdthesis)
Kilbertus, N.
Beyond traditional assumptions in fair machine learning
University of Cambridge, UK, September 2020, (Cambridge-Tübingen-Fellowship) (phdthesis)
Rubenstein, P.
Advances in Latent Variable and Causal Models
University of Cambridge, UK, July 2020, (Cambridge-Tuebingen-Fellowship) (phdthesis)
Wieschollek, P.
Learning from Multi-Frame Data
University of Tübingen, Germany, July 2020 (phdthesis)
Balog, M.
Converting to Optimization in Machine Learning: Perturb-and-MAP, Differential Privacy, and Program Synthesis
University of Cambridge, UK, July 2020, (Cambridge-Tübingen-Fellowship) (phdthesis)
2019
Büchler, D.
Robot Learning for Muscular Systems
Technical University Darmstadt, Germany, December 2019 (phdthesis)
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
Gomez-Gonzalez, S.
Real Time Probabilistic Models for Robot Trajectories
Technical University Darmstadt, Germany, December 2019 (phdthesis)
Meding, K., Schölkopf, B., Wichmann, F. A.
Perception of temporal dependencies in autoregressive motion
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
Bruijns, S. A., Meding, K., Schölkopf, B., Wichmann, F. A.
Phenomenal Causality and Sensory Realism
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
Shao, K., Logothetis, N., Besserve, M.
Neural mass modeling of the Ponto-Geniculo-Occipital wave and its neuromodulation
28th Annual Computational Neuroscience Meeting (CNS*2019), July 2019 (poster)
Rojas-Carulla, M.
Learning Transferable Representations
University of Cambridge, UK, February 2019 (phdthesis)
Gu, S.
Sample-efficient deep reinforcement learning for continuous control
University of Cambridge, UK, 2019 (phdthesis)
Weichwald, S.
Pragmatism and Variable Transformations in Causal Modelling
ETH Zurich, 2019 (phdthesis)