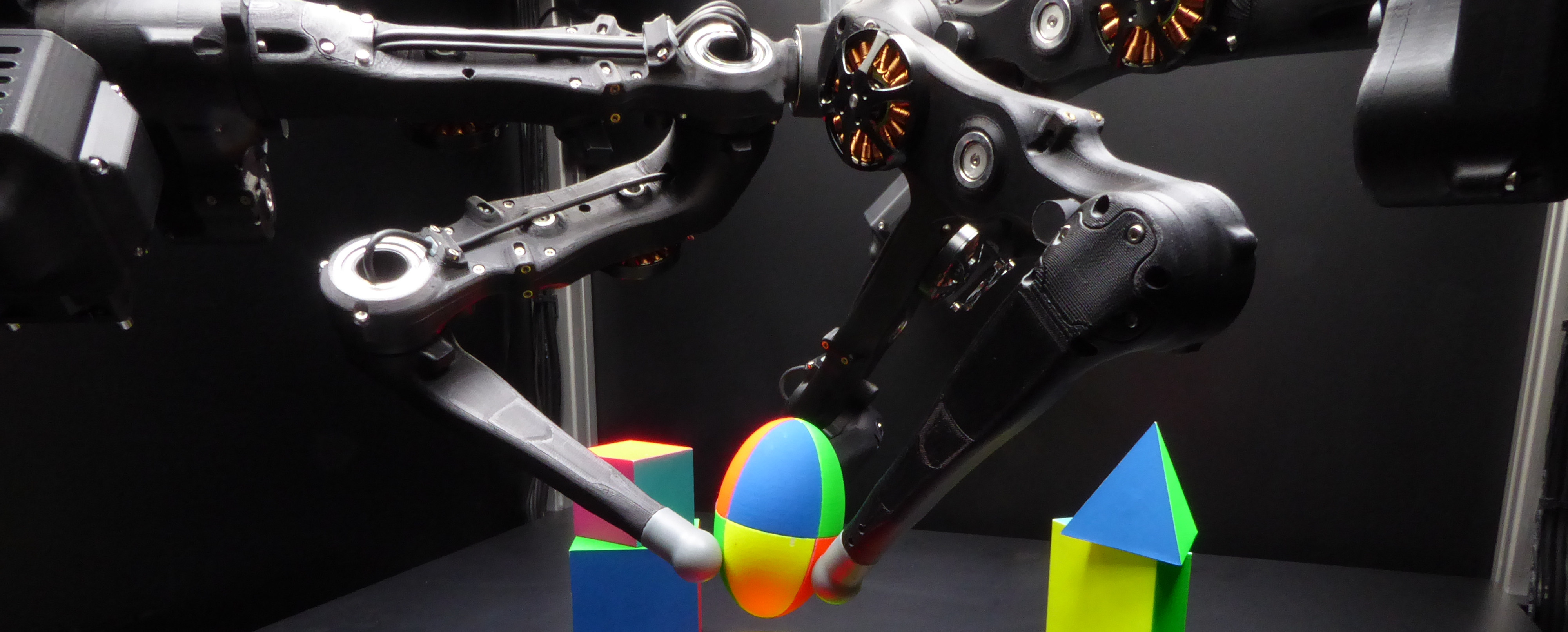
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. To a large extent, this is due to the high cost of experimentation on real systems and the lack of benchmarks that are shared across research institutions. We address this problem by designing an open-source robotic platform, called Trifinger [ ], that can easily be built by researchers around the world using off-the-shelf components and 3D-printed parts for a cost of about \$5000. This platform consists of three robotic fingers capable of dexterous object manipulation (the finger design is based on the leg of a quadruped also developed in-house [ ]).
To allow researchers that are not able to build their own platform to conduct research in robotics, we host 8 Trifinger platforms at MPI-IS [ ]. Researchers anywhere in the world are able to control the platforms remotely by submitting code that is executed automatically much like on a compute cluster.
Despite having finished the development of this robotic platform only recently, it has already given rise to a number of initiatives and publications, some of which we discuss below.
Robotics Competition We hosted a competition (https://real-robot-challenge.com/), where teams from anywhere in the world accessed our platforms to tackle challenging tasks, and we published the dataset collected during this competition (consisting of hundreds of robot hours) [ ]. This competition gave rise to novel algorithms for robotic manipulation and has already lead to follow-up work by some of the participants, e.g., [ ].
Transfer Learning Building agents that can transfer learned models, representations (e.g., of images), and skills (e.g., pushing an object) to unseen scenarios is one of the remaining key challenges in artifical intelligence. So far, the research community mostly evaluated such algorithms on small, synthetic toy problems. In contrast, using the Trifinger platform we can generate a continuum of realistic tasks that can be designed to share any desired amount of structure (for instance, two tasks may be defined to use identical or different objects). In [ ] we generated a dataset containing robot motions in different regimes (e.g., high-speed vs low-speed), such that researchers can assess whether the dynamics learned under one regime transfer to another. We built a simulation of the Trifinger where numerous properties of the world, such as gravity and object colors, sizes, and shapes can be modified [ ]. This facilitates research into causal representations and models that transfer to unseen scenarios or even to the real robot. In [ ] and [ ] we conducted large-scale studies of disentangled representations in more realistic settings than previous work. We observed that disentanglement was a good predictor for out-of-distribution (OOD) task performance.